Approfondimenti |
|

Il piede è il punto fisso al suolo su cui grava l'intero peso del corpo. Esso si trova alla base del sistema di controllo antigravitario (sistema posturale o di equilibrio) che consente all'uomo di assumere la postura eretta e di spostarsi nello spazio. Il piede è sia un effettore sia un ricettore ossia riceve ed esegue dei comandi (risposta motoria), tramite i muscoli, e, nel contempo, interagisce col resto del corpo sia attraverso il sistema miofasciale sia fornendo costanti informazioni provenienti dagli esterocettori cutanei presenti sulla sua pianta e dai propriocettori dei suoi muscoli, tendini e articolazioni. Gli esterocettori cutanei del piede sono ad alta sensibilità (0,3 g) e rappresentano l'interfaccia costante tra l'ambiente e il sistema tonico posturale o dell'equilibrio. Le informazioni plantari infatti sono le uniche a derivare da un recettore sensoriale fisso a diretto contatto col suolo. Il riflesso plantare (flessione delle dita al graffiamento della pianta), legato alle stimolazioni cutanee della pianta del piede, è in grado di attivare e modulare riflessi molto complessi con funzioni posturali di notevole importanza. Pertanto il piede è considerato il principale organo di senso e di moto antigravitario del corpo umano, come si denota nelle rappresentazioni motorie e sensitive dell'homunculus.
Per questo motivo il piede, nelle popolazioni dei paesi sviluppati che vivono su un terreno poco fisiologico quale è il terreno piano, è normalmente l'origine dello squilibrio posturale. Nello stesso tempo esso è anche l'elemento adattativo che tampona, meglio che può, gli squilibri alti, in genere discendennti dall'apparato stomatognatico (denti e articolazione temporomandibolare) e/o dagli occhi e/o dal vestibolo.
Il piede, nel corso dell'evoluzione che dura da circa 350 milioni di anni, per le esigenze sorte nell'assunzione della stazione eretta e della deambulazione bipodale, ha acquisito, quale caratteristica umana peculiare e differenziale, l'attitudine all'irrigidimento ovvero alla coesione intersegmentale. Tale coesione podalica è realizzata dalle formazioni capsulo-legamentose (immagine) e aponeurotiche (immagine) a cui si aggiungono le formazioni muscolari con funzioni di "legamenti attivi" e posturali. Questi muscoli, in particolare quelli intrinseci del piede, sono a prevalenza di fibre rosse (fibre ad attività lenta ed energeticamente economica), in stato contrattile pressochè ininterrotto in stazione eretta e in rapporto topografico e funzionale con le formazioni capsulo-legamentose (in sede di inserzione ossea si osserva, in alcuni di loro, una notevole abbondanza di fibre collagene espanse e non raccolte come al solito; ciò ricorda le formazioni legamentose e aponeurotiche). Anche se l'intervento muscolare globale nella realizzazione della coesione interossea sembra comunque essere meno rilevante rispetto alla funzione di controllo e regolazione della funzione antigravitaria, la complessità dell'azione podalica richiede una polivalenza funzionale. Inoltre, la podo-meccanica antigravitaria è cosparsa di interventi muscolari che coinvolgono due o più aricolazioni. I muscoli poliarticolari infatti offrono particolari vantaggi ai fini dell'economia energetica in quanto sono in grado di sviluppare tensioni notevoli con modici accorciamenti. Tali muscoli frequentemente agiscono stabilizzando l'articolazione prossimale favorendo così i movimenti dei segmenti distali (e quindi la rotazione dell'articolazione relativa). L'indagine elettromiografica conferma la particolare economia energetica realizzata dai muscoli in fase antigravitaria: vengono infatti realizzati potenziali inferiori a quelli propri della contrazione tetanica (caratteristica dell'attività dei muscoli a fibre bianche o acceleratori). L'insieme delle formazioni muscolari che interessano il piede, quali effettori nel sistema di controllo gravitario, rappresentano le forze interne in "contrasto" con le forze esterne ovvero ambientali.
Il piede umano quindi si evolve da una forma prensile alla forma stabilizzatrice antigravitaria conservando la complessità della propria muscolatura; all'afferramento prensile si sostituisce l'aggrappamento antigravitario. Il piede è così il dispositivo di gran lungo più valido che l'uomo possiede per il controllo dell'ambiente sottoposto alle legge di gravità.
L'informazione genetica conferisce alla struttura podalica la modellatura di fondo. L'informazione ambientale confluisce nella genetica che la memorizza gradualmente, nel corso delle generazioni, potenziando la genesi delle prerogative antigravitarie. Il fattore culturale però interferisce su tale sviluppo alterando l'informazione ambientale (creando terreni e scarpe inadeguati) causando così un ritardo evolutivo.
In biomeccanica, nessuna forza interna a un corpo, ossia che si esaurisce nell'ambito del corpo (rappresentata dai muscoli nel caso dell'uomo), è in grado di spostarlo nello spazio. Affinchè il corpo si muova è necessaria una forza esterna. Le forze esterne ambientali per eccellenza sono: la gravità, la reazione dal suolo e l'attrito. L'uomo moderno ha nei piedi i più efficaci strumenti per prelevare dalla gravità le energie necessarie per la locomozione. Non vi è dubbio che quella "gravitazionaria" è l'attività senso-motrice di gran lunga più importante e il movimento che la esprime può essere concepito come il fattore determinante ai fine della vita dell'uomo, quale essere più esposto alle "aggressioni" ambientali.
Il corpo umano è un sistema di equilibrio instabile; l'altezza del centro di gravità (idealmente anteriore alla terza vertebra lombare) rispetto a una base ristretta e la struttura composta da una successione di segmenti articolati, sono fattori di instabilità. Solo un vigile controllo (sistema tonico posturale) riesce, in tale condizione, a ricercare l'equilibrio dinamico stabile nella stazione eretta e l'equilibrio dinamico instabile durante la locomozione (che consente la trasformazione dell'energia potenziale in energia cinetica). Ciò avviene soprattutto grazie a un servizio informativo (esterocettori cutanei e propriocettori) talmente preciso e tempestivo da consentire risposte validissime con interventi energeticamente economici (non rilevabili elettromiograficamente) da parte di muscoli con prevalenza di fibre rosse. Si tratta della manifestazione informativa più importante in quanto fornisce all'uomo il privilegio di adattarsi alle più svariate condizioni ambientali.
 Il piede è un diaframma interposto tra forze esterne (ambientali) e forze interne (muscolari), che in esso si incontrano, si contrastano e infine si fondono per l'affermazione della condizione di equilibrio. Il piede è una struttura "spaziale" ossia atta ad assorbire e smistare le forze, relativamente agli infiniti piani dello spazio.
Il piede è un diaframma interposto tra forze esterne (ambientali) e forze interne (muscolari), che in esso si incontrano, si contrastano e infine si fondono per l'affermazione della condizione di equilibrio. Il piede è una struttura "spaziale" ossia atta ad assorbire e smistare le forze, relativamente agli infiniti piani dello spazio.
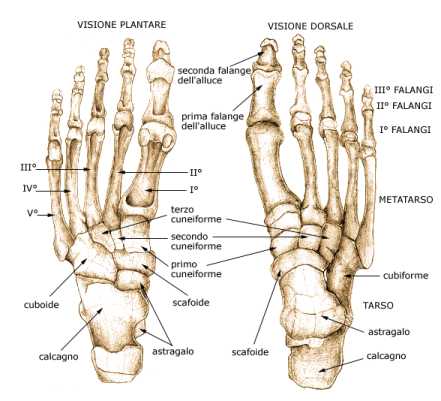
La struttura del piede è un capolavoro unico di architettura, o meglio di biomeccanica, con le sue 26 ossa, 33 articolazioni e 20 muscoli. Funzionalmente e strutturalmente è possibile suddividere il piede in:
- retropiede formato da astragalo e calcagno, dispositivo centrale" del controllo biomeccanico della gravità;
- avampiede formato da scafoide, cuboide, 3 cuneiformi (definiti anche mesopiede; il mesopiede più il retropiede forma il tarso), 5 raggi metatarsali (metatarso) e le falangi delle 5 dita; funge da "adattatore e reattore".
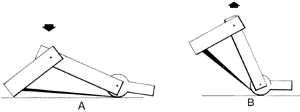
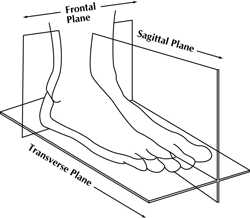
Il piede, nel suo ruolo di "base antigravitaria", in un primo tempo prende contatto con la superficie di appoggio adattandosi ad essa rilasciandosi, successivamente si irrigidisce, divenendo una leva per "respingere" la superficie stessa. Il piede deve quindi alternare la condizione di rilasciamento con la condizione di irrigidimento. L'alternanza di lassità-rigidità giustifica l'analogia con l'elica a passo variabile. Retropiede e avampiede si dispongono infatti in piani che si intersecano in modo variabile. Nella condizione ideale, il retropiede è disposto verticalmente e l'avampiede orizzontalmente (su una superficie di appoggio orizzontale). A piede sotto carico la torsione tra retropiede e avampiede si attenua nel rilassamento (il piede diviene una piattaforma modellabile) e si accentua nell'irrigidimento (il piede diviene una leva). La disposizione ad arco è in realtà apparente essendo espressione del grado di avvolgimento dell'elica podalica. Il piede quindi non ha il significato di un arco o volta reale ma apparente, che si alza durante l'avvolgimento e si abbassa durante lo svolgimento dell'elica. L'avvolgimento dell'elica, con la conseguente accentuazione dell'apparente disposizione ad arco, corrisponde al suo irrigidimento. Lo svolgimento dell'elica, con conseguente attenuazione dell'arco apparente, è il rilasciamento.
 La torsione (avvolgimento) dell'elica podalica è connessa alla rotazione esterna (extrarotazione) dei segmenti sovrapodalici (gamba e femore). L'astragalo ruotando all'esterno solidalmente con le ossa della gamba, sale sul calcagno chiudendo in tal modo l'articolazione medio-tarsica; il retropiede si verticalizza. L'avampiede aderente tenacemente al suolo reagisce alle forze torcenti applicate sul retropiede; il piede è quindi irrigidito.
La torsione (avvolgimento) dell'elica podalica è connessa alla rotazione esterna (extrarotazione) dei segmenti sovrapodalici (gamba e femore). L'astragalo ruotando all'esterno solidalmente con le ossa della gamba, sale sul calcagno chiudendo in tal modo l'articolazione medio-tarsica; il retropiede si verticalizza. L'avampiede aderente tenacemente al suolo reagisce alle forze torcenti applicate sul retropiede; il piede è quindi irrigidito.
Occorre tener presente che in biomeccanica sono presenti numerosi meccanismi elicoidali in quanto, fungendo come piani inclinati, consentono di agire con sforzi minimi su rilevanti resistenze.
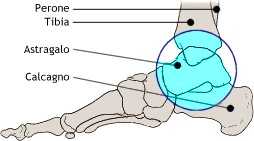 Nella biomeccanica del piede Il "dispositivo centrale" di controllo della gravità è il complesso articolare peri-astragalico (retropiede) composto da:
Nella biomeccanica del piede Il "dispositivo centrale" di controllo della gravità è il complesso articolare peri-astragalico (retropiede) composto da:
1. articolazione tibio-peroneo-astragalica;
2. articolazione sotto-astragalica posteriore (astragalo-calcaneare)
3. articolazione sotto-astragalica anteriore (astragalo-scafoidea)
4. articolazione medio-tarsica o di Chopart (astragalo-scafoidea + calcaneo-cuboidea)
L'astragalo, osso con cui non prende rapporto diretto nessun muscolo (non presenta inserzioni muscolari), si muove a seguito delle forze trasmesse dalle ossa adiacenti. L'astragalo è un osso del piede in quanto è solidarizzato al calcagno e allo scafoide nelle rotazioni sul piano sagittale (flesso-estensione) ed è osso della gamba in quanto è solidarizzato con la tibia e al perone, tramite la pinza bimalleolare, nelle rotazioni dei segmenti sovrapodalici sul piano trasverso (intra-extrarotazioni).
Il movimento proprio dell'articolazione sottoastragalica è la prono-supinazione (eversione-inversione) che avviene intorno all'asse noto come "asse di compromesso". L'asse di compromesso è in realtà un asse "momentaneo", in quanto varia la sua collocazione nello spazio durante il passaggio dalla fasi di irrigidimento (in cui accentua la sua elevazione) a quella di rilasciamento del piede; i valori angolari a cui si fa riferimento vanno pertanto intesi come intermedi di un range di normalità (al di fuori del quale si va nella patologia).
L'articolazione astragalo-calcaneare (sotto-astragalica posteriore) è divisa in una regione antero-mediale e una postero-laterale da una tenace formazione fibrosa, il legamento interosseo, che torcendosi connette sempre più tenacemente astragalo e calcagno durante l'irrigidimento antigravitario.
L'articolazione medio-tarsica o di Chopart è costituita dalle due articolazione astragalo-scafoidea e calcaneo-cuboidea. Essa è la sede di separazione tra retropiede e avampiede nonchè il luogo dove converge il contrasto retro-avampodalico durante l'elicazione del piede. Da questa articolazione l'azione procede chiamando in causa le articolazioni distali ossia dell'avampiede.
L'avampiede assume il significato, oltre che di "adattatore" alla superficie di appoggio (fase di rilasciamento), di "reattore" in quanto sede di applicazione della reazione al suolo ossia della spinta propulsiva che nell'arco dell'irrigidimento migra in direzione calcaneo-digitale; le sue articolazioni sono:
- articolazione tarso-metatarsale o di Lisfranc
- articolazioni metatarso-falangee
- articolazioni falangee
Le articolazioni metatarso-falengee, tramite la flessione dorsale delle dita, avviano il meccanismo dell'argano nel periodo ultimo e definitivo dell'irrigidimento podalico (propulsione), durante la deambulazione. L'estensione dorsale delle dita tende la aponeurosi plantare (immagine) realizzando il grado estremo di irrigidimento; L'avvolgimento delle singole digitazioni dell'aponeurosi plantare attorno al capitello del relativo metatarso realizza una condizione meccanica simile a un argano (elica --> leva --> argano). Nella fase di rilasciamento, al contrario, le dita si adagiano e ampliano la superficie di appoggio e l'aponeurosi plantare è detesa.
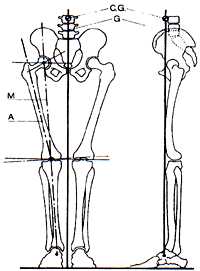 Nella stazione eretta comoda la linea gravitaria (G = asse gravitario, M = asse mecanico, A = asse anatomico, C.G. = centro di gravità) cade ventralmente rispetto all'articolazione tibio-trasica (caviglia) L'articolazione sottoastragalica si trova in posizione intermedia tra pronazione e supinazione. L'articolazione medio-tarsica è disposta in pronazione rispetto al retropiede. La serie delle teste metatarsali si adatta alla superficie di appoggio. Si tratta in realtà di una condizione momentanea in quanto, passando la linea gravitaria davanti all'articolazione tibiotarsica, il peso applica su di essa momenti rotatori che sollecitano il corpo in avanti; la migrazione ventrale della linea gravitaria è ragione di accentuazione della torsione retroavampodalica (irrigidimento podalico). Il compito della muscolatura podalica e del tricipite della sura in particolare (gastrocnemio e soleo), in funzione antigravitria, è quello di neutralizzare tali momenti rotatori, oltre quelli che inducono oscillazioni sul piano frontale. La stazione eretta è infatti in realtà non un equilibrio statico ma un "movimento su base stazionaria" (equilibrio dinamico stabile); le oscillazioni, sia pure minime (verificabili tramite esame stabilometrico), che la caratterizzano sono dovute alle attività cardio-circolatorie e respiratorie. I riflessi spinali assumono qui un ruolo fondamentale. La verticalità infatti si verifica prevalentemente per mezzo di meccanismi estero-propriocettivi (compresi quelli visivi e vestibolari).
Nella stazione eretta comoda la linea gravitaria (G = asse gravitario, M = asse mecanico, A = asse anatomico, C.G. = centro di gravità) cade ventralmente rispetto all'articolazione tibio-trasica (caviglia) L'articolazione sottoastragalica si trova in posizione intermedia tra pronazione e supinazione. L'articolazione medio-tarsica è disposta in pronazione rispetto al retropiede. La serie delle teste metatarsali si adatta alla superficie di appoggio. Si tratta in realtà di una condizione momentanea in quanto, passando la linea gravitaria davanti all'articolazione tibiotarsica, il peso applica su di essa momenti rotatori che sollecitano il corpo in avanti; la migrazione ventrale della linea gravitaria è ragione di accentuazione della torsione retroavampodalica (irrigidimento podalico). Il compito della muscolatura podalica e del tricipite della sura in particolare (gastrocnemio e soleo), in funzione antigravitria, è quello di neutralizzare tali momenti rotatori, oltre quelli che inducono oscillazioni sul piano frontale. La stazione eretta è infatti in realtà non un equilibrio statico ma un "movimento su base stazionaria" (equilibrio dinamico stabile); le oscillazioni, sia pure minime (verificabili tramite esame stabilometrico), che la caratterizzano sono dovute alle attività cardio-circolatorie e respiratorie. I riflessi spinali assumono qui un ruolo fondamentale. La verticalità infatti si verifica prevalentemente per mezzo di meccanismi estero-propriocettivi (compresi quelli visivi e vestibolari).
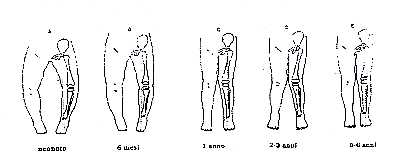 A differenza di tutti gli altri mammiferi quadrupedi, che stanno in piedi e camminano in modo corretto poco tempo dopo la nascita, l'uomo deve attendere circa 6 anni per ottenere una postura stabile (e una maturazione degli atti di deglutizione e masticazione). A circa dodici mesi di vita si ha il passaggio graduale al bipodalismo ma è solo all'età di 5-6 anni che si formano e si stabilizzano le curve vertebrali (lordosi lombare e cervicale e cifosi dorsale) e ciò avviene grazie alla maturazione estero-propriocettiva del piede (il piede è fisiologicamente piatto fino all'età di circa 4 anni per poi trasformarsi gradualmente in una struttura elicoidale a passo variabile). E' quindi il piede il responsabile delle modificazioni delle curve vertebrali in posizione eretta (ortostatismo); la fisiologica lordosi lombare si forma e si stabilizza a partire dalla formazione di una fisiologica e stabile volta plantare, a 5-6 anni di età, che libera il tronco cefalico da uno stato di ipertonicità, regolando così anche la cifosi dorsale e la lordosi cervicale. Prima di questa età, a partire da circa 1 anno, è normale che il piede sia un pò pronato e piatto, che le ginocchia siano un pò valghe e che vi sia una leggera iperlordosi lombare. Mentre nel neonato e fino a circa 8 mesi, è fisiologica la presenza di ginocchia vare e piede in supinazione. Tutti gli studi hanno confermato che la formazione delle curve parte dal basso. Va però aggiunto che a circa 6 anni, con la comparsa dei primi molari, deglutizione, masticazione, equilibrio occlusale giungono contemporaneamente a completa maturazione. Il completamento dello sviluppo della funzione posturale (sistema tonico posturale) avviene abitualmente verso gli undici anni e resta poi stabile sino a circa 65 anni (contemporaneamente alla stabilizzazione della funzione visiva sensoriale e motoria). La formazione e l'accrescimento del sistema muscolo-fasciale-scheletrico e del piano occlusale sono il risultato della complessa e personale azione antigravitazionale dell'individuo. Il piede, assieme alla lingua (per quanto riguarda le ossa del cranio), rappresenta un conformatore organo-funzionale di primaria importanza.
A differenza di tutti gli altri mammiferi quadrupedi, che stanno in piedi e camminano in modo corretto poco tempo dopo la nascita, l'uomo deve attendere circa 6 anni per ottenere una postura stabile (e una maturazione degli atti di deglutizione e masticazione). A circa dodici mesi di vita si ha il passaggio graduale al bipodalismo ma è solo all'età di 5-6 anni che si formano e si stabilizzano le curve vertebrali (lordosi lombare e cervicale e cifosi dorsale) e ciò avviene grazie alla maturazione estero-propriocettiva del piede (il piede è fisiologicamente piatto fino all'età di circa 4 anni per poi trasformarsi gradualmente in una struttura elicoidale a passo variabile). E' quindi il piede il responsabile delle modificazioni delle curve vertebrali in posizione eretta (ortostatismo); la fisiologica lordosi lombare si forma e si stabilizza a partire dalla formazione di una fisiologica e stabile volta plantare, a 5-6 anni di età, che libera il tronco cefalico da uno stato di ipertonicità, regolando così anche la cifosi dorsale e la lordosi cervicale. Prima di questa età, a partire da circa 1 anno, è normale che il piede sia un pò pronato e piatto, che le ginocchia siano un pò valghe e che vi sia una leggera iperlordosi lombare. Mentre nel neonato e fino a circa 8 mesi, è fisiologica la presenza di ginocchia vare e piede in supinazione. Tutti gli studi hanno confermato che la formazione delle curve parte dal basso. Va però aggiunto che a circa 6 anni, con la comparsa dei primi molari, deglutizione, masticazione, equilibrio occlusale giungono contemporaneamente a completa maturazione. Il completamento dello sviluppo della funzione posturale (sistema tonico posturale) avviene abitualmente verso gli undici anni e resta poi stabile sino a circa 65 anni (contemporaneamente alla stabilizzazione della funzione visiva sensoriale e motoria). La formazione e l'accrescimento del sistema muscolo-fasciale-scheletrico e del piano occlusale sono il risultato della complessa e personale azione antigravitazionale dell'individuo. Il piede, assieme alla lingua (per quanto riguarda le ossa del cranio), rappresenta un conformatore organo-funzionale di primaria importanza.
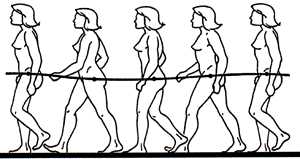 La deambulazione (marcia o cammino) bipodale dell'uomo è condizionata dal sollevamento del centro di gravità e dalla esiguità della base di appoggio, rispetto al quadrupedismo. E' un atto complesso risultante dalle interazioni fra forza interne ed esterne dirette da un mirabile sistema di controllo posturale e dell'equilibrio, che regola attimo per attimo, tramite i muscoli, i rapporti fra le forze. La maggior parte dei gruppi muscolari degli arti inferiori sono attivi durante la deambulazione (l'arto inferiore possiede ben 29 gradi di libertà di movimento a cui corrispondono 48 muscoli).
La deambulazione (marcia o cammino) bipodale dell'uomo è condizionata dal sollevamento del centro di gravità e dalla esiguità della base di appoggio, rispetto al quadrupedismo. E' un atto complesso risultante dalle interazioni fra forza interne ed esterne dirette da un mirabile sistema di controllo posturale e dell'equilibrio, che regola attimo per attimo, tramite i muscoli, i rapporti fra le forze. La maggior parte dei gruppi muscolari degli arti inferiori sono attivi durante la deambulazione (l'arto inferiore possiede ben 29 gradi di libertà di movimento a cui corrispondono 48 muscoli).
La locomozione umana è una combinazione di ritmica propulsione in avanti ed elevazione del corpo in alto. Il baricentro corporeo in deambulazione ha un andamento sinusoidale sul piano sagittale raggiungendo il punto più basso nell'appoggio doppio (bipodalico) e la massima altezza in appoggio monopodalico, con un'escursione di 4-5 cm.
Dal punto di vista strettamente meccanico, la progressione del corpo nello spazio è il risultato della combinazione di rotazioni articolari. Esattamente come i movimenti circolari delle ruote si traducono nel movimento in avanti del veicolo, movimenti rotatori (cerchi parziali) degli arti o di parti di essi si traducono nel movimento in avanti di tutto il corpo. Grazie al posizionamento alto del baricentro corporeo, l'accelerazione del nostro corpo è sostanzialmente di genesi gravitaria (energia potenziale che si trasforma in energia cinetica). Solo in misura modesta entrano in gioco contrazioni muscolari acceleranti ed è questa la ragione del fatto che l'uomo può protrarre il suo cammino molto a lungo. Si può infatti affermare che nella deambulazione il lavoro muscolare è richiesto solo nella risalita periodica del centro di gravità.
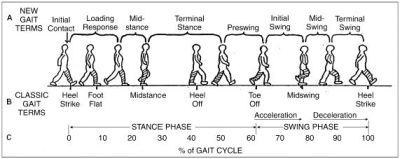
Il ciclo della deambulazione è compreso fra i due appoggi calcaneari dello stesso piede ed è costituito da una fase portante (60% dell'intero ciclo) e una fase oscillante (40% dell'intero ciclo).
- Fase portante (Stance phase)
- Appoggio calcaneare (ricezione, fase frenante / initial contact)
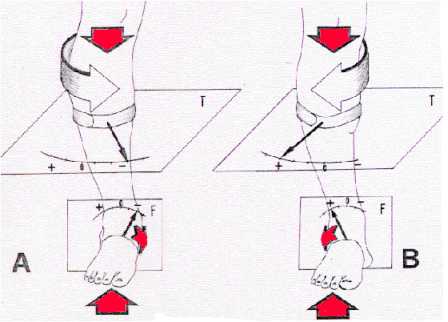 Al contatto del calcagno con la superficie di appoggio (ricezione), l'elica si rilascia per consentire la lassità del piede atta ad ammortizzare il peso del corpo e ad adattarsi alla superficie stessa. A tal fine l'arto inferiore ruota internamente, l'astragalo, ad esso solidale, ruota quindi anch'esso internamente supinando, il calcagno prona, ruotando esternamente. L'assunzione del peso da parte del piede è graduale ed è massima nel momento in cui la linea gravitaria cade nel centro della superficie podalica.
Al contatto del calcagno con la superficie di appoggio (ricezione), l'elica si rilascia per consentire la lassità del piede atta ad ammortizzare il peso del corpo e ad adattarsi alla superficie stessa. A tal fine l'arto inferiore ruota internamente, l'astragalo, ad esso solidale, ruota quindi anch'esso internamente supinando, il calcagno prona, ruotando esternamente. L'assunzione del peso da parte del piede è graduale ed è massima nel momento in cui la linea gravitaria cade nel centro della superficie podalica.
- B. Appoggio totale (contatto / midstance)
Quando tutta la superficie plantare è a contatto con la superficie, la rotazione interna dell'arto si trasforma bruscamente in rotazione esterna. Ciò fa scattare il meccanismo che ha come sede l'articolazione sotto-astragalica. Seguendo la rotazione dell'arto, l'astragalo ruota sul piano trasverso esternamente (per ca. 12° mediamente) pronando e risalendo al di sopra del calcagno (allontanandosi dal legamento calcaneo-scafoideo-plantare). A sua volta il calcagno ruota internamente, supinando attorno all'asse di compromesso: il retropiede si verticalizza tramite l'avvitamento reciproco astragalo-calcaneare.
Il cuboide, tenacemente collegato al calcagno, migra plantarmente assumendo "sulle sue spalle" la serie dei cuneiformi.
L'avampiede si dispone in contrasto rotatorio con il retropiede per la reazione al suolo. Si ha così l'avvolgimento dell'elica podalica e il conseguente "inarcamento" del piede: l'articolazione medio-tarsica è bloccata e si ha il contemporaneo passaggio del peso sul IV e V metatarso per eversione dell'avampiede non ancora rigido. Il muscolo peroniero lungo (lungo peroneo) richiama a contatto col suolo la testa del I metatarso eseguendo un lavoro di stabilizzazione facendo si che il peso sia ora distribuito su tutte le teste metatarsali (ventaglio metatarsale); il piede si trasforma da elica in rigida "barra di leva". - Appoggio digitale (propulsione, fase propulsiva / terminal stance)
 Il calcagno si solleva dal terreno. Le dita dopo essersi adattate tenacemente alla superficie di appoggio si flettono dorsalmente. Ciò fa sì che la aponeurosi plantare (immagine) si accorcia tendendosi di ca. 1 cm (le digitazioni dell'aponeurosi plantare raggiungono le falangi basali corrispondenti, connettendosi al periostio, nei segmenti adiacenti alle articolazioni) innescando il meccanismo dell'argano che completa la coesione intrapodalica.
Il calcagno si solleva dal terreno. Le dita dopo essersi adattate tenacemente alla superficie di appoggio si flettono dorsalmente. Ciò fa sì che la aponeurosi plantare (immagine) si accorcia tendendosi di ca. 1 cm (le digitazioni dell'aponeurosi plantare raggiungono le falangi basali corrispondenti, connettendosi al periostio, nei segmenti adiacenti alle articolazioni) innescando il meccanismo dell'argano che completa la coesione intrapodalica.
Il centro di gravità del corpo migra ventralmente e il corpo si avvia a cadere in avanti. L'intervento del controllo muscolare, in particolare del muscolo tricipite surale, formato da gastrocnemio e soleo (oltre al tibiale anteriore, tibiale posteriore, peroneo lungo e flessori dorsali) e il tempestivo contatto controlaterale, esercitano azione da freno.
Nella fase propulsiva le forze agenti sul piede sono pari a 3-4 volte il peso del corpo. In situazione di corretta fisiologia il piede si comporta a elica in modo tale che la proiezione a terra del baricentro corporeo resti perlopiù centrata ossia passi lungo il proprio asse, che corrisponde all'incirca all'asse podalico, asse passante centralmente al retropiede e al centro tra II e III dito.
- Fase oscillante (Swing phase)
- Appoggio calcaneare (ricezione, fase frenante / initial contact)
 La fase oscillante si verifica tra il distacco delle dita dal suolo e il successivo l’appoggio del tallone dello stesso piede. Essa rappresenta la provvidenziale preparazione per la fase portante. La rotazione interna dell'arto, attorno all'asse meccanico, che inizia in questa fase, è indispensabile premessa per la successiva rotazione esterna. E' grazie a questa alternanza di rotazioni che l'energia potenziale si trasforma nel corpo umano in energia cinetica. Le fasi oscillanti e portanti sono pertanto legate relativamente alla continuità della progressione. Il pendolo podalico è in realtà un pendolo portante. Il complesso neuro-muscolare vigila su questo reciproco passaggio di consegne stabilizzandolo, modulandolo e caratterizzandolo quale espressione tipica dell'individualità.
La fase oscillante si verifica tra il distacco delle dita dal suolo e il successivo l’appoggio del tallone dello stesso piede. Essa rappresenta la provvidenziale preparazione per la fase portante. La rotazione interna dell'arto, attorno all'asse meccanico, che inizia in questa fase, è indispensabile premessa per la successiva rotazione esterna. E' grazie a questa alternanza di rotazioni che l'energia potenziale si trasforma nel corpo umano in energia cinetica. Le fasi oscillanti e portanti sono pertanto legate relativamente alla continuità della progressione. Il pendolo podalico è in realtà un pendolo portante. Il complesso neuro-muscolare vigila su questo reciproco passaggio di consegne stabilizzandolo, modulandolo e caratterizzandolo quale espressione tipica dell'individualità.
 E' quindi nel piano trasverso che la moderna biomeccanica ha individuato l'elemento spaziale prioritario nella statica e nella dinamica dell'uomo. Difatti è dalla rotazione nel piano trasverso che scatta il meccanismo antigravitario, il quale consente la migrazione del baricentro verso l'alto. L'altezza del baricentro carica il sistema di energia potenziale, ovvero di instabilità che però, come abbiamo detto, si trasforma in indispensabile energia cinetica nella dinamica, consentendo così la progressione nello spazio con un modesto consumo di energia muscolare.
E' quindi nel piano trasverso che la moderna biomeccanica ha individuato l'elemento spaziale prioritario nella statica e nella dinamica dell'uomo. Difatti è dalla rotazione nel piano trasverso che scatta il meccanismo antigravitario, il quale consente la migrazione del baricentro verso l'alto. L'altezza del baricentro carica il sistema di energia potenziale, ovvero di instabilità che però, come abbiamo detto, si trasforma in indispensabile energia cinetica nella dinamica, consentendo così la progressione nello spazio con un modesto consumo di energia muscolare.
Relativamente all'arto inferiore, le articolazioni in cui si compie il movimento nel piano trasverso sono, a catena cinetica chiusa, la coxofemorale (articolazione dell'anca) e la sottoastragalica. In particolare, l'articolazione coxofemorale e l'articolazione astragalo-scafoidea sono analogamente strutturate e corrispondentemente disposte. I movimenti essenziali nella meccanica antigravitaria dell'anca sono l'estensione e la concomitante rotazione esterna e viceversa (flessione-intrarotazione). Nel trasferimento dalla flessione all'estensione quindi il femore ruota verso l'esterno riflettendosi nel meccanismo di rilasciamento-irrigidimento podalico. E' questa quindi una condizione anatomo-funzionale che favorisce la nostra antigravitarietà.
E' ancora da chiarire con precisione il ruolo delle masse muscolari nella stabilizzazione dell'arto inferiore nel piano trasverso. Si ritiene che i muscoli chiamati in causa siano gli adduttori dell'anca, i flessori del ginocchio, lo psoas, il piccolo e medio gluteo, ma il muscolo determinante sembra essere il grande gluteo (estensore, abduttore ed extrarotatore dell'anca). Il grande gluteo è considerato il più potente stabilizzatore dell'anca nel piano trasverso. La sua attività di estensore contribuisce validamente al mantenimento del centro di gravità (o baricentro) al di sopra dei centri di rotazione delle anche. La sua prevalente attività stabilizzatrice esplica una funzione essenziale nella deambulazione e la sua azione si estende all'articolazione del ginocchio tramite il tratto ileo tibiale.
L'analisi delle caratteristiche morfologiche e funzionali dell'arto inferiore relativamente al piano trasverso apre un grosso capitolo di patologia strutturale che contempla le anomalie di rotazione femoro-tibiale e le ripercussioni sulla funzionalità podalica e viceversa. Si getta in tal modo un robusto ponte che connette sempre più il piede ai segmenti corporei soprastanti, in particolare, col cingolo pelvico, col cingolo scapolo-omerale, con la cerniera cervico-occipitale fino all'articolazione temporomandibolare, nel contesto della biomeccanica e della pato-meccanica.
Nella patologia podomeccanica l'assimilazione piede-elica costituisce sempre il riferimento di base ai fini di un'adeguata elaborazione diagnostica e programmazione terapeutica. Nel prendere contatto con la superficie di appoggio, infatti, il piede acquisisce il significato di dispositivo ammortizzante, in grado di assorbire e neutralizzare le forze e i momenti di forza applicati istantaneamente sotto forma di urto, al fine di tutelare la propria integrità. Il piede riesce a realizzare ciò grazie al suo svolgimento elicoidale graduale; mentre avvolgendosi realizza l'azione antigravitaria. Si tratta di interventi che impegnano al massimo il piede, prova ne è la frequenza delle manifestazioni podo-patologiche da ipersollecitazione (metatarsalgia, neuroma di Morton, spina calcaneare, callosità ad esempio), per gradi anche modesti di alterazione posturale che rendono il piede inadatto a regolare il rapporto fra forze interne ed esterne. Quanto più è rapido l'impatto tanto più è probabile il danno alla struttura podalica (da cui l'inadeguatezza di attività quali la corsa o i salti prolungati nel tempo).
Rivolgendo l'attenzione alle superfici (terreni piani) e agli involucri (scarpe) con cui il piede viene a contatto, fin dai primi passi e per tutta la vita, spesso inadatti ma che la civiltà e la moda ci impongono (per la forma senza riguardi per la sostanza ovvero per la salute), il rapporto fra informazione genetica, rivelata dalla morfostruttura originaria, e l'informazione ambientale, invece di un armonico incontro assume gli aspetti di una disputa alla quale, nelle età successive, si risale attraverso i segni lasciati nel piede e nella postura. L'insufficienza gravitaria primaria scaturisce da anomalie dell'integrazione informativa genetica-ambientale e si esprime usualmente come inattitudine dell'elica podalica a svolgere fisiologicamente il suo compito.
Il piede piatto (ritenuto fisiologico fino a circa 6 anni di età), risulta abitualmente da una carenza di irrigidimento per difetto di rotazione dei segmenti anteriori all'astragalo (l'elica podalica si avvolge in maniera insufficiente) dando luogo, in successione cronologica, a cedevolezza nel piede infantile, piede valgo-piatto nell'adolescenza e piede piatto artrosico nell'adulto. Al contrario, nel piede cavo avremo un eccesso di rotazione (pronazione) dei segmenti anteriori all'astragalo (e quindi un difetto di rilasciamento e un'eccessiva elicatura podalica). Occorre considerare che l’organismo reagisce di norma sul terreno piano cercando di aggrapparsi ad esso cavizzando il piede (lo stesso motivo favorisce l'alterazione in dita a martello o a griffe o ad artiglio). Data la comune asimmetria posturale, si riscontrano di frequente atteggiamenti diversi dei due piedi. La baropodometria, in statica e in deambulazione, risulta uno strumento di estrema importanza per la corretta diagnosi del piede piatto/cavo.
Ulteriore frequente patologia podalica è l'alluce valgo, che è accompagnata da lussazione dei relativi ossi sesamoidi ed esostosi laterale della I testa metatarsale (ricoperta da callosità per il continuo sfregamento con la calzatura). Le cause dell'alluce valgo sono da ricercarsi nei carichi squilibrati sul piede, in modo particolare sull'avampiede durante la fase propulsiva del passo, a cui si aggiunge il contributo di scarpe inadeguate (tacchi alti, punta stretta)e della predisposizione genetica.
Non va trascurato il fatto che il piede è anche un organo di senso, ossia porta di ingresso degli stimoli ambientali. Di conseguenza, le anomalie strutturali del piede non solo rendono precaria la risposta motoria (ovvero l'avvolgimento dell'elica) ma sono anche ragione di ostacolo alla ricezione corretta della stimolazione ambientale. La ricettività dei recettori gravitari, presenti in gran numero nei muscoli e nelle formazioni articolari e aponeurotiche del piede (immagine), risulta alterata essendo anomali la disposizione e la condizione circolatoria dei tessuti che li ospitano. I legamenti (legamento deltoideo, legamento calcaneo-scafoideo plantare, legamento interosseo ecc.) e le formazioni muscolo-tendinee (nel piede piatto ovvero nel difetto di avvolgimento dell'elica podalica, in particolare, il tibiale posteriore, il flessore lungo dell'alluce e il flessore lungo delle dita, essendo strutture che controllano la pronazione), infatti, sono sollecitati da tensioni abnormi. Come conseguenza di ciò, il circuito di controllo della gravità risulta almeno parzialmente occluso.
Risulta chiaro che un appoggio non corretto può far sentire le conseguenze a caviglia, ginocchio, anca, tutta la colonna vertebrale, fino a interessare il posizionamento del cranio e quindi il apparato occlusale (stomatognatico).
Normalizzando la ricezione dell'informazione ambientale, ne risulterà potenziata l'integrazione informativa genetica-ambientale favorendo così l'iter evolutivo.
E' evidente la fondamentale importanza della posturologia e di plantari. calzature e pavimenti ergonomici quale supporti idonei a prevenire e correggere le anomalie dell'appoggio plantare e quindi posturali.
